utils Package¶
generic Module¶
Generic utility functions to
- write variables and tuples to file
- write and read setting from a file
- modify and create tuples.
- get_current_epoch_time()[source]¶
Return the current time in seconds since the Epoch.
Fractions of a second may be present if the OS provides them (UNIX-like do).
Returns: number of seconds since the Epoch Return type: float
- read_settings(filename, section)[source]¶
Read section from settings file at filename.
Parameters: - filename (str) – settings file
- section (str) – settings section
Returns: settings section dictionary
Return type: dict
Example:
>>> read_settings('test.cfg', 'mySection') {'a_key': 1.1111, 'another_key': False}
- write_settings(filename, section, mapped_values)[source]¶
Write mapped_values at section in settings file at filename.
Parameters: - filename (str) – settings file
- section (str) – settings section
- mapped_values (dict) – values to write
Example:
>>> write_settings('test.cfg', 'mySection', {'a_key': 1.1111, 'another_key': False})
geometry Module¶
- class Transform(pos=None, rot=None)[source]¶
Bases: object
An homogeneous transform.
It is a composition of rotation and translation. Mathematically it can be expressed as
![\left[
\begin{array}{ccc|c}
& & & \\
& R & & T \\
& & & \\
\hline
0 & 0 & 0 & 1
\end{array}
\right]](../_images/math/98571123dffc2dd78179d7634be3013fdc2764f0.png)
where R is the 3x3 submatrix describing rotation and T is the 3x1 submatrix describing translation.
source: http://en.wikipedia.org/wiki/Denavit%E2%80%93Hartenberg_parameters#Denavit-Hartenberg_matrix
Constructor.
With empty arguments it’s just a 4x4 identity matrix.
Parameters: - pos (tuple, numpy.ndarray or None) – a size 3 vector, or 3x1 or 1x3 matrix
- rot (tuple, numpy.ndarray or None) – 3x3 or 9x1 rotation matrix
- get_rotation(as_numpy=False)[source]¶
Get the rotation component (matrix).
Parameters: as_numpy – whether to return a numpy object or a tuple Returns: 3x3 rotation matrix Return type: tuple of tuples or numpy.ndarray
- calc_compass_angle(rot)[source]¶
Return the angle around the vertical axis with respect to the X+ axis, i.e. the angular orientation inherent of a rotation matrix rot, constrained to the plane aligned with the horizon (XZ, since the vertical axis is Y).
- calc_inclination(rot)[source]¶
Return the inclination (as pitch and roll) inherent of rotation matrix rot, with respect to the plane (XZ, since the vertical axis is Y). pitch is the rotation around Z and roll around Y.
Examples:
>>> rot = calc_rotation_matrix((1.0, 0.0, 0.0), pi/6) >>> pitch, roll = gemut.calc_inclination(rot) 0.0, pi/6
>>> rot = calc_rotation_matrix((0.0, 1.0, 0.0), whatever) >>> pitch, roll = gemut.calc_inclination(rot) 0.0, 0.0
>>> rot = calc_rotation_matrix((0.0, 0.0, 1.0), pi/6) >>> pitch, roll = gemut.calc_inclination(rot) pi/6, 0.0
- calc_rotation_matrix(axis, angle)[source]¶
Return the row-major 3x3 rotation matrix defining a rotation of magnitude angle around axis.
Formula is the same as the one presented here (as of 2011.12.01): http://goo.gl/RkW80

The returned matrix format is length-9 tuple.
- get_body_relative_vector(body, vector)[source]¶
Return the 3-vector vector transformed into the local coordinate system of ODE body ‘body’
- make_OpenGL_matrix(rot, pos)[source]¶
Return an OpenGL compatible (column-major, 4x4 homogeneous) transformation matrix from ODE compatible (row-major, 3x3) rotation matrix rotation and position vector position.
The returned matrix format is length-9 tuple.
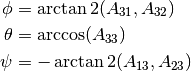
- rot_matrix_to_euler_angles(rot)[source]¶
Return the 3-1-3 Euler angles phi, theta and psi (using the x-convention) corresponding to the rotation matrix rot, which is a tuple of three 3-element tuples, where each one is a row (what is called row-major order).
Using the x-convention, the 3-1-3 Euler angles phi, theta and psi (around the Z, X and again the Z-axis) can be obtained as follows:
mathematical Module¶
Functions to perform operations over vectors and matrices; deal with homogeneous transforms; convert angles and other structures.
- calc_acceleration(time_step, vel0, vel1)[source]¶
Calculate the vectorial substraction vel1 - vel0 divided by time step. If any of the vectors is None, then None is returned.
vel1 is the velocity measured time_step seconds after vel0.
- cross_product(vector1, vector2)[source]¶
Return the cross product of 3-dimension vector1 and vector2.
- dot_product(vec1, vec2)[source]¶
Efficient dot-product operation between two vectors of the same size. source: http://docs.python.org/library/itertools.html
- matrix_as_3x3_tuples(tuple_9)[source]¶
Return tuple_9 as a 3-tuple of 3-tuples.
Parameters: tuple_9 – tuple of 9 elements Returns: tuple_9 formatted as tuple of tuples
- matrix_as_tuple(matrix_)[source]¶
Convert matrix_ to a tuple.
Example:
>>> matrix_as_tuple(((1, 2), (3, 4))) (1, 2, 3, 4)
Parameters: matrix (tuple) – nested tuples Returns: matrix_ flattened as a tuple Return type: tuple
- matrix_multiply(matrix1, matrix2)[source]¶
Return the matrix multiplication of matrix1 and matrix2.
Parameters: - matrix1 – LxM matrix
- matrix2 – MxN matrix
Returns: LxN matrix, product of matrix1 and matrix2
Return type: tuple of tuples
- np_matrix_to_tuple(array_)[source]¶
Convert Numpy 2D array (i.e. matrix) to a tuple of tuples.
source: http://stackoverflow.com/a/10016379/556413
Example:
>>> arr = numpy.array(((2, 2), (2, -2))) >>> np_matrix_to_tuple(arr) ((2, 2), (2, -2))
Parameters: array (numpy.ndarray) – 2D array (i.e. matrix) Returns: matrix as tuple of tuples
- project3(vector, unit_vector)[source]¶
Return projection of 3-dimension vector onto unit 3-dimension unit_vector.
- rotate3(rot, vector)[source]¶
Return the rotation of 3-dimension vector by 3x3 (row major) matrix rot.

version Module¶
- get_hg_changeset()[source]¶
Return the global revision id that identifies the working copy.
To obtain the value it runs the command hg identify --id, whose short form is hg id -i.
>>> get_hg_changeset() 1a4b04cf687a >>> get_hg_changeset() 1a4b04cf687a+
Note
When there are outstanding (i.e. uncommitted) changes in the working copy, a + character will be appended to the current revision id.
- get_hg_tip_timestamp()[source]¶
Return a numeric identifier of the latest changeset of the current repository based on its timestamp.
To obtain the value it runs the command hg tip --template '{date}'
>> get_hg_tip_timestamp() ‘20130328021918’
Based on: django.utils.get_git_changeset @ commit 9098504, and http://hgbook.red-bean.com/read/customizing-the-output-of-mercurial.html
Django’s license is included at docs/Django BSD-LICENSE.txt
- get_version(version=None, length=u'full')[source]¶
Return a PEP 386-compliant version number from version.
Parameters: - version (tuple of strings) – the value to format, expressed as a tuple of strings, of length 5, with the element before last (i.e. version[3]) equal to any of the following: ('alpha', 'beta', 'rc', 'final')
- length (basestring) – the format of the returned value, equal to any of the following: ('short', 'medium', 'full')
Returns: version as a string
Return type: str
>>> get_version(version=(0, 4, 0, 'alpha', 0)) 0.4.dev20130401011455 >>> get_version(version=(0, 4, 0, 'alpha', 1)) 0.4a1 >>> get_version(version=(0, 4, 1, 'alpha', 0)) 0.4.1.dev20130401011455 >>> get_version(version=(0, 4, 1, 'alpha', 1)) 0.4.1a1 >>> get_version(version=(0, 4, 0, 'beta', 0)) 0.4b0 >>> get_version(version=(0, 4, 0, 'rc', 0)) 0.4c0 >>> get_version(version=(0, 4, 0, 'final', 0)) 0.4 >>> get_version(version=(0, 4, 0, 'final', 1)) 0.4 >>> get_version(version=(0, 4, 1, 'final', 0)) 0.4.1
>>> get_version(version=(0, 4, 0, 'alpha', 0), length='medium') 0.4.dev >>> get_version(version=(0, 4, 0, 'alpha', 0), length='short') 0.4
Based on: django.utils.version @ commit 9098504. Django’s license is included at docs/Django BSD-LICENSE.txt