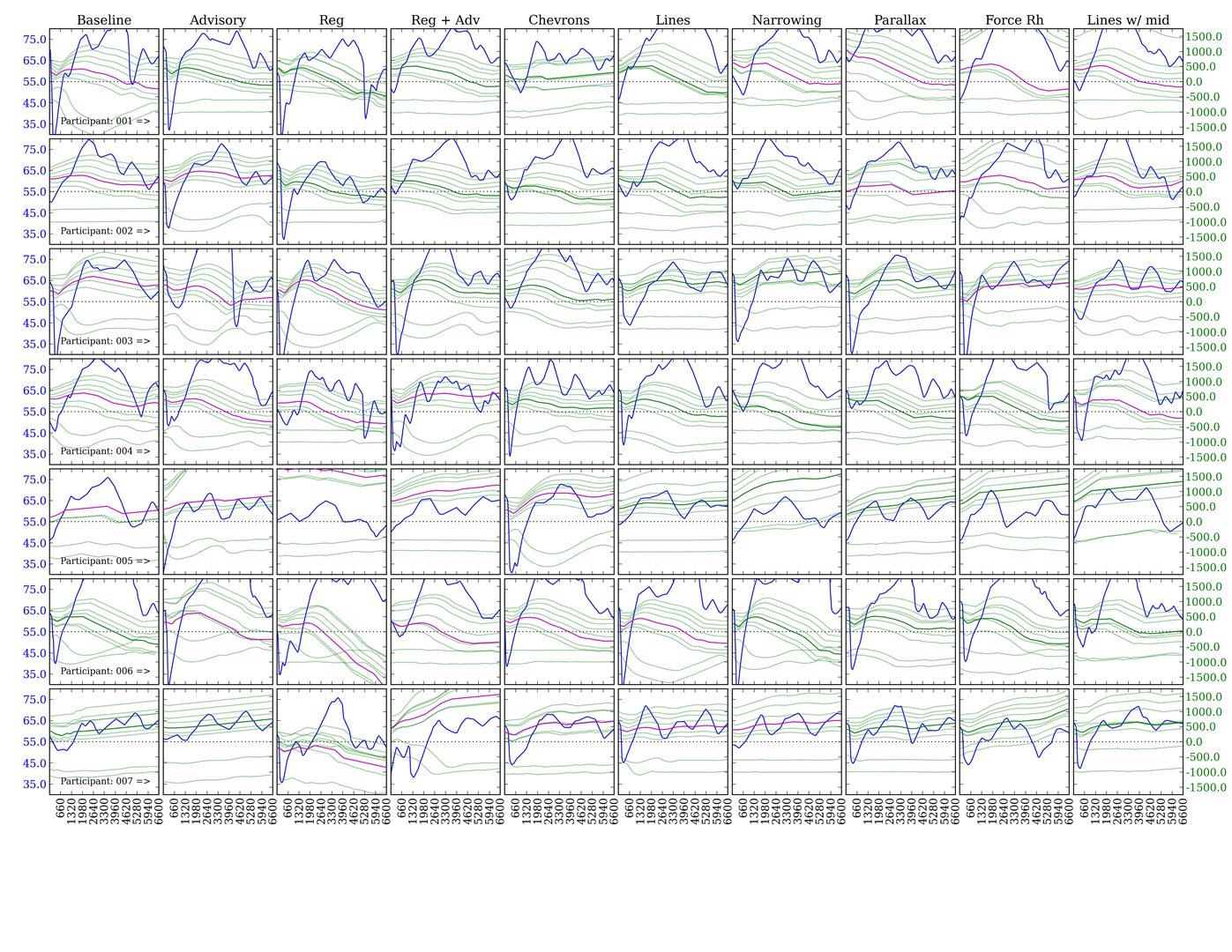
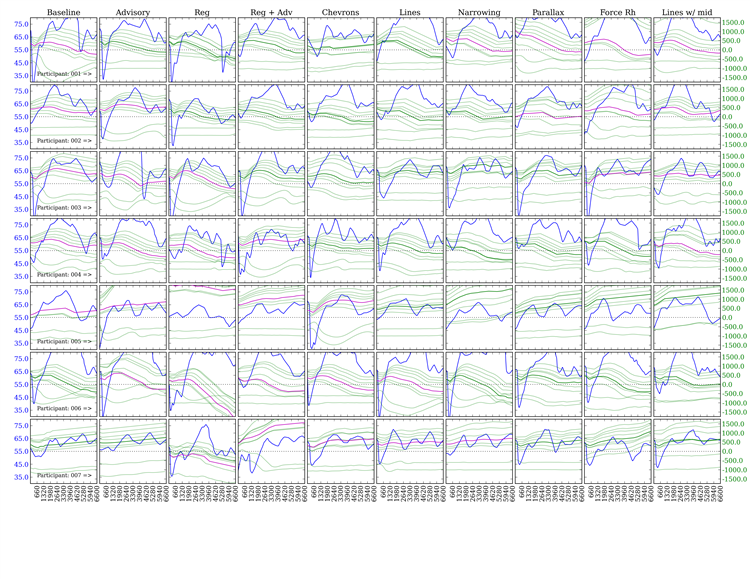
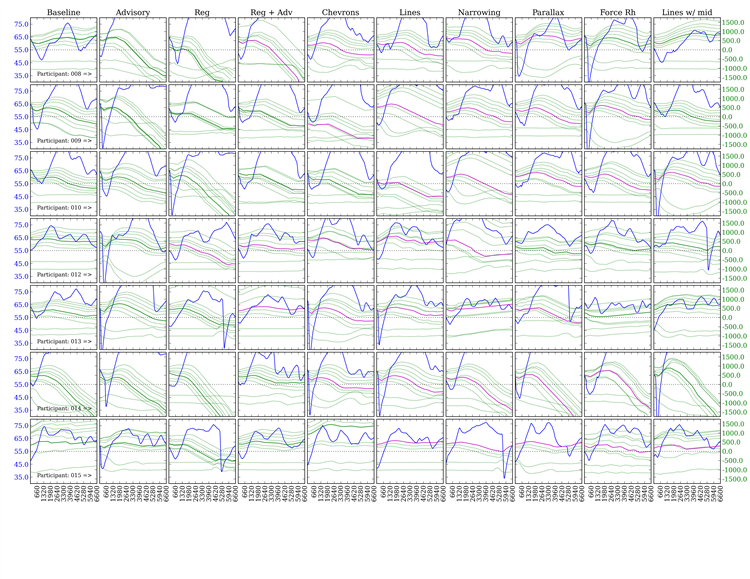
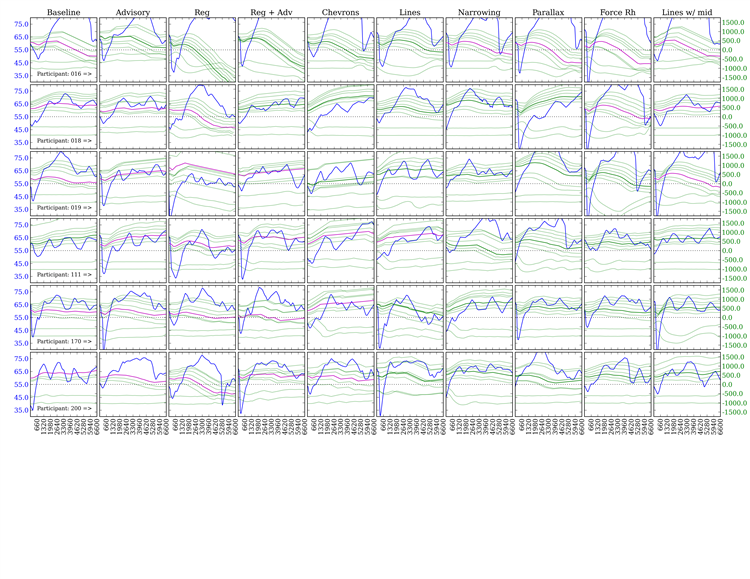
Example 05: Ado headway distance visualization¶
Example multiple subplot ensemble figure of equidistantly interpolated speed. In this example each subplot represents the level of independent conditions.
The Script:
from __future__ import print_function
# Copyright (c) 2013, Roger Lew
# All rights reserved.
import os
import glob
from operator import attrgetter
import time
from matplotlib import rcParams
rcParams['font.family'] = 'serif'
import matplotlib.pyplot as plt
import numpy as np
from undaqTools import Daq, fslice, findex
def mult_ado_by_pid_plot(pids, page):
global hdf5_files, scenario_names, latin_square, get_pid
# initialize plot
fig = plt.figure(figsize=(11*1.75, 8.5*1.75))
fig.subplots_adjust(left=.04, right=.96,
bottom=.05, top=.97,
wspace=.04, hspace=.04)
# plot will have 2 axis. One is for Vehicle Speed, the other is
# for relative distance of the DynObjs
xticks = np.linspace(660,5280*1.25,10)
xlim = [0, 5280*1.25]
# speed in MPH
yticks1 = np.linspace(35,75,5)
ylim1 = [30,80]
# relative distance in Feet
yticks2 = np.linspace(-1500,1500,7)
ylim2 = [-1750,1750]
# loop through the hdf5_files that contain
# data for the requested participants
for hdf5_file in [hd for hd in hdf5_files if get_pid(hd) in pids]:
print('analyzing "%s"'%hdf5_file)
daq = Daq()
daq.read_hd5(hdf5_file)
pid = daq.etc['pid']
# figure out row number
rnum = pids.index(pid)
# find the relevant dynamic objects to plot
platoon = [do for do in daq.dynobjs.values() if 'Ado' in do.name]
platoon = sorted(platoon, key=attrgetter('name'))
# for each trial...
for i in xrange(10):
if not ( i*10+1 in daq.etc['epochs'] and \
i*10+3 in daq.etc['epochs']):
# encountered partial trial
continue
scenario = daq.etc['scen_order'][i]
scenario_name = scenario_names[scenario]
print(' PID: %03i, Passing zone: %i (%s)'%(pid, i, scenario_name))
# unpack the start frame of the 1-to-2 lane addition transition
# and the stop frame of the 2-to-1 lane reduction transition
f0 = daq.etc['epochs'][i*10+1].start
fend = daq.etc['epochs'][i*10+3].stop
# get axis handle
ax1 = plt.subplot(8, 10, rnum*10 + scenario + 1)
distance = daq['VDS_Veh_Dist'][0, fslice(f0, fend)].flatten()
distance -= distance[0]
speed = daq['VDS_Veh_Speed'][0, fslice(f0, fend)].flatten()
ax1.plot(distance, speed, 'b')
ax2 = ax1.twinx()
# we need to figure out when the Ados enter the passing lane
# and exit the passing lane. To do this we need to know where
# the passing lane starts and ends
pos0 = daq['VDS_Chassis_CG_Position'][:,findex(f0)]
posend = daq['VDS_Chassis_CG_Position'][:,findex(fend)]
# loop through and plot ados
for j, do in enumerate(platoon):
# each passing zone has its own set of Ados. This
# sorts out which are actually defined (should be
# defined) for this trial.
if i*10 <= int(do.name[-2:]) < (i+1)*10:
# figure out when the ado enters the
d0 = np.sum((do.pos - pos0)**2., axis=0)**.5
dend = np.sum((do.pos - posend)**2., axis=0)**.5
# indexes relative to do arrays
imin0 = d0.argmin()
iminend = dend.argmin()
# now we can plot the Ados relative distance to the
# vehicle as a function of distance over the passing
# lane
# with this dataset the thrid vehicle in the platoon
# was systematically manipulate
if 'L' in do.name:
color = 'm'
alpha = 1.
elif 'S' in do.name:
color = 'g'
alpha = 1.
else:
color = 'g'
alpha = .4
if iminend-imin0 > 0:
distance = do.distance[0, imin0:iminend]
distance -= distance[0]
rel_distance = do.relative_distance[0, imin0:iminend]
ax2.plot(distance, rel_distance, color=color, alpha=alpha)
else:
print(' %s did not drive '
'through passing zone'%do.name)
# make things pretty
ax1.set_ylim(ylim1)
ax1.set_yticks(yticks1)
if scenario:
ax1.set_yticklabels(['' for y in yticks1])
else:
ax1.set_yticklabels(yticks1, color='b')
ax2.axhline(0, color='k', linestyle=':')
ax2.set_ylim(ylim2)
ax2.set_yticks(yticks2)
if scenario != 9:
ax2.set_yticklabels(['' for y in yticks2])
else:
ax2.set_yticklabels(yticks2, color='g')
ax2.set_xlim(xlim)
ax2.set_xticks(xticks)
if rnum == 0:
ax1.set_title(scenario_names[scenario])
if rnum == len(pids)-1:
ax1.set_xticklabels(['%i'%x for x in xticks],
rotation='vertical')
else:
ax1.set_xticklabels(['' for x in xticks])
if not scenario:
ax1.text(660,35,'Participant: %03i =>'%pids[rnum],
size='small')
img_name = 'do_passing_behavior__PAGE%i.png'%page
fig.savefig(img_name, dpi=300)
plt.close()
if __name__ == '__main__':
t0 = time.time()
scenario_names = ['Baseline',
'Advisory',
'Reg',
'Reg + Adv',
'Chevrons',
'Lines',
'Narrowing',
'Parallax',
'Force Rh',
'Lines w/ mid']
n = 7 # number of pids per page
# data is on a local SSD drive. This is very important for performance.
data_dir = 'C:\\LocalData\\Left Lane\\'
# change the directory of the kernel
print("Changing wd to '%s'"%data_dir)
os.chdir(data_dir)
get_pid = lambda fname : int(fname.split('\\')[0][4:])
hdf5_files = glob.glob('*/*.hdf5')
pids = sorted(list(set([get_pid(hf) for hf in hdf5_files])))
print(pids)
for i in xrange(len(pids)/n+1):
mult_ado_by_pid_plot(pids[i*n:i*n+n], i+1)
print('\nDone.\n\nMaking multipanel plot took %.1f s'%(time.time()-t0))
The plots
Download [hi-res]
{kind=link}
Download [hi-res]
{kind=link}
Download [hi-res]
{kind=link}
Example Output:
Changing wd to 'C:\LocalData\Left Lane\'
analyzing "Part01\Left_01_20130424102744.hdf5"
PID: 001, Passing zone: 0 (Baseline)
PID: 001, Passing zone: 1 (Advisory)
PID: 001, Passing zone: 2 (Lines w/ mid)
Ado28 did not drive through passing zone
PID: 001, Passing zone: 3 (Reg)
PID: 001, Passing zone: 4 (Force Rh)
PID: 001, Passing zone: 5 (Reg + Adv)
PID: 001, Passing zone: 6 (Parallax)
PID: 001, Passing zone: 7 (Chevrons)
PID: 001, Passing zone: 8 (Narrowing)
PID: 001, Passing zone: 9 (Lines)
analyzing "Part02\Left_02_20130425084730.hdf5"
PID: 002, Passing zone: 0 (Advisory)
PID: 002, Passing zone: 1 (Reg)
PID: 002, Passing zone: 2 (Baseline)
PID: 002, Passing zone: 3 (Reg + Adv)
PID: 002, Passing zone: 4 (Lines w/ mid)
PID: 002, Passing zone: 5 (Chevrons)
PID: 002, Passing zone: 6 (Force Rh)
PID: 002, Passing zone: 7 (Lines)
PID: 002, Passing zone: 8 (Parallax)
PID: 002, Passing zone: 9 (Narrowing)
analyzing "Part03\Left_03_20130425102301.hdf5"
PID: 003, Passing zone: 0 (Reg)
PID: 003, Passing zone: 1 (Reg + Adv)
PID: 003, Passing zone: 2 (Advisory)
PID: 003, Passing zone: 3 (Chevrons)
PID: 003, Passing zone: 4 (Baseline)
PID: 003, Passing zone: 5 (Lines)
PID: 003, Passing zone: 6 (Lines w/ mid)
PID: 003, Passing zone: 7 (Narrowing)
PID: 003, Passing zone: 8 (Force Rh)
PID: 003, Passing zone: 9 (Parallax)
analyzing "Part04\Left_04_20130425142804.hdf5"
PID: 004, Passing zone: 0 (Reg + Adv)
PID: 004, Passing zone: 1 (Chevrons)
PID: 004, Passing zone: 2 (Reg)
PID: 004, Passing zone: 3 (Lines)
PID: 004, Passing zone: 4 (Advisory)
PID: 004, Passing zone: 5 (Narrowing)
PID: 004, Passing zone: 6 (Baseline)
PID: 004, Passing zone: 7 (Parallax)
PID: 004, Passing zone: 8 (Lines w/ mid)
PID: 004, Passing zone: 9 (Force Rh)
analyzing "Part05\Left_05_20130425161122.hdf5"
PID: 005, Passing zone: 0 (Chevrons)
PID: 005, Passing zone: 1 (Lines)
PID: 005, Passing zone: 2 (Reg + Adv)
PID: 005, Passing zone: 3 (Narrowing)
PID: 005, Passing zone: 4 (Reg)
PID: 005, Passing zone: 5 (Parallax)
PID: 005, Passing zone: 6 (Advisory)
PID: 005, Passing zone: 7 (Force Rh)
PID: 005, Passing zone: 8 (Baseline)
PID: 005, Passing zone: 9 (Lines w/ mid)
analyzing "Part06\Left_06_20130426111502.hdf5"
PID: 006, Passing zone: 0 (Lines)
PID: 006, Passing zone: 1 (Narrowing)
PID: 006, Passing zone: 2 (Chevrons)
PID: 006, Passing zone: 3 (Parallax)
PID: 006, Passing zone: 4 (Reg + Adv)
PID: 006, Passing zone: 5 (Force Rh)
PID: 006, Passing zone: 6 (Reg)
PID: 006, Passing zone: 7 (Lines w/ mid)
PID: 006, Passing zone: 8 (Advisory)
PID: 006, Passing zone: 9 (Baseline)
analyzing "Part07\Left_07_20130426143846.hdf5"
PID: 007, Passing zone: 0 (Narrowing)
PID: 007, Passing zone: 1 (Parallax)
PID: 007, Passing zone: 2 (Lines)
PID: 007, Passing zone: 3 (Force Rh)
PID: 007, Passing zone: 4 (Chevrons)
PID: 007, Passing zone: 5 (Lines w/ mid)
PID: 007, Passing zone: 6 (Reg + Adv)
PID: 007, Passing zone: 7 (Baseline)
PID: 007, Passing zone: 8 (Reg)
Ado82 did not drive through passing zone
PID: 007, Passing zone: 9 (Advisory)
analyzing "Part08\Left_08_20130426164114.hdf5"
analyzing "Part08\Left_08_20130426164301.hdf5"
PID: 008, Passing zone: 0 (Parallax)
PID: 008, Passing zone: 1 (Force Rh)
PID: 008, Passing zone: 2 (Narrowing)
PID: 008, Passing zone: 3 (Lines w/ mid)
PID: 008, Passing zone: 4 (Lines)
PID: 008, Passing zone: 5 (Baseline)
PID: 008, Passing zone: 6 (Chevrons)
PID: 008, Passing zone: 7 (Advisory)
PID: 008, Passing zone: 8 (Reg + Adv)
PID: 008, Passing zone: 9 (Reg)
analyzing "Part09\Left09_20130423155149.hdf5"
PID: 009, Passing zone: 0 (Force Rh)
PID: 009, Passing zone: 1 (Lines w/ mid)
PID: 009, Passing zone: 2 (Parallax)
PID: 009, Passing zone: 3 (Baseline)
PID: 009, Passing zone: 4 (Narrowing)
PID: 009, Passing zone: 5 (Advisory)
PID: 009, Passing zone: 6 (Lines)
PID: 009, Passing zone: 7 (Reg)
PID: 009, Passing zone: 8 (Chevrons)
PID: 009, Passing zone: 9 (Reg + Adv)
analyzing "Part10\Left10_20130423155149.hdf5"
PID: 010, Passing zone: 0 (Lines w/ mid)
PID: 010, Passing zone: 1 (Baseline)
PID: 010, Passing zone: 2 (Force Rh)
PID: 010, Passing zone: 3 (Advisory)
PID: 010, Passing zone: 4 (Parallax)
PID: 010, Passing zone: 5 (Reg)
PID: 010, Passing zone: 6 (Narrowing)
PID: 010, Passing zone: 7 (Reg + Adv)
PID: 010, Passing zone: 8 (Lines)
PID: 010, Passing zone: 9 (Chevrons)
analyzing "Part12\Left_12_20130429163745.hdf5"
PID: 012, Passing zone: 0 (Advisory)
PID: 012, Passing zone: 1 (Reg)
PID: 012, Passing zone: 2 (Baseline)
PID: 012, Passing zone: 3 (Reg + Adv)
PID: 012, Passing zone: 4 (Lines w/ mid)
PID: 012, Passing zone: 5 (Chevrons)
PID: 012, Passing zone: 6 (Force Rh)
PID: 012, Passing zone: 7 (Lines)
PID: 012, Passing zone: 8 (Parallax)
PID: 012, Passing zone: 9 (Narrowing)
analyzing "Part13\Left_13_20130429182923.hdf5"
PID: 013, Passing zone: 0 (Reg)
PID: 013, Passing zone: 1 (Reg + Adv)
PID: 013, Passing zone: 2 (Advisory)
PID: 013, Passing zone: 3 (Chevrons)
PID: 013, Passing zone: 4 (Baseline)
PID: 013, Passing zone: 5 (Lines)
PID: 013, Passing zone: 6 (Lines w/ mid)
PID: 013, Passing zone: 7 (Narrowing)
PID: 013, Passing zone: 8 (Force Rh)
PID: 013, Passing zone: 9 (Parallax)
analyzing "Part14\Left_14_20130430102504.hdf5"
PID: 014, Passing zone: 0 (Reg + Adv)
PID: 014, Passing zone: 1 (Chevrons)
PID: 014, Passing zone: 2 (Reg)
PID: 014, Passing zone: 3 (Lines)
PID: 014, Passing zone: 4 (Advisory)
PID: 014, Passing zone: 5 (Narrowing)
PID: 014, Passing zone: 6 (Baseline)
PID: 014, Passing zone: 7 (Parallax)
PID: 014, Passing zone: 8 (Lines w/ mid)
PID: 014, Passing zone: 9 (Force Rh)
analyzing "Part15\Left_15_20130430171947.hdf5"
PID: 015, Passing zone: 0 (Chevrons)
PID: 015, Passing zone: 1 (Lines)
PID: 015, Passing zone: 2 (Reg + Adv)
PID: 015, Passing zone: 3 (Narrowing)
PID: 015, Passing zone: 4 (Reg)
PID: 015, Passing zone: 5 (Parallax)
PID: 015, Passing zone: 6 (Advisory)
PID: 015, Passing zone: 7 (Force Rh)
PID: 015, Passing zone: 8 (Baseline)
PID: 015, Passing zone: 9 (Lines w/ mid)
analyzing "Part16\Left_16_20130501103917.hdf5"
PID: 016, Passing zone: 0 (Lines)
PID: 016, Passing zone: 1 (Narrowing)
PID: 016, Passing zone: 2 (Chevrons)
PID: 016, Passing zone: 3 (Parallax)
PID: 016, Passing zone: 4 (Reg + Adv)
PID: 016, Passing zone: 5 (Force Rh)
PID: 016, Passing zone: 6 (Reg)
PID: 016, Passing zone: 7 (Lines w/ mid)
PID: 016, Passing zone: 8 (Advisory)
PID: 016, Passing zone: 9 (Baseline)
analyzing "Part18\Left_18_20130502084422.hdf5"
PID: 018, Passing zone: 0 (Parallax)
PID: 018, Passing zone: 1 (Force Rh)
PID: 018, Passing zone: 2 (Narrowing)
analyzing "Part18\Left_18_reset_20130502090909.hdf5"
PID: 018, Passing zone: 3 (Lines w/ mid)
PID: 018, Passing zone: 4 (Lines)
PID: 018, Passing zone: 5 (Baseline)
PID: 018, Passing zone: 6 (Chevrons)
PID: 018, Passing zone: 7 (Advisory)
PID: 018, Passing zone: 8 (Reg + Adv)
PID: 018, Passing zone: 9 (Reg)
analyzing "Part111\Left_11_20130430081052.hdf5"
PID: 111, Passing zone: 0 (Baseline)
PID: 111, Passing zone: 1 (Advisory)
PID: 111, Passing zone: 2 (Lines w/ mid)
PID: 111, Passing zone: 3 (Reg)
PID: 111, Passing zone: 4 (Force Rh)
PID: 111, Passing zone: 5 (Reg + Adv)
PID: 111, Passing zone: 6 (Parallax)
PID: 111, Passing zone: 7 (Chevrons)
PID: 111, Passing zone: 8 (Narrowing)
PID: 111, Passing zone: 9 (Lines)
analyzing "Part170\Left_17_20130501163745.hdf5"
PID: 170, Passing zone: 0 (Lines w/ mid)
PID: 170, Passing zone: 1 (Baseline)
PID: 170, Passing zone: 2 (Force Rh)
PID: 170, Passing zone: 3 (Advisory)
PID: 170, Passing zone: 4 (Parallax)
PID: 170, Passing zone: 5 (Reg)
PID: 170, Passing zone: 6 (Narrowing)
PID: 170, Passing zone: 7 (Reg + Adv)
PID: 170, Passing zone: 8 (Lines)
PID: 170, Passing zone: 9 (Chevrons)
analyzing "Part19\Left_19_20130502153547.hdf5"
PID: 019, Passing zone: 0 (Force Rh)
PID: 019, Passing zone: 1 (Lines w/ mid)
PID: 019, Passing zone: 2 (Parallax)
PID: 019, Passing zone: 3 (Baseline)
PID: 019, Passing zone: 4 (Narrowing)
PID: 019, Passing zone: 5 (Advisory)
PID: 019, Passing zone: 6 (Lines)
PID: 019, Passing zone: 7 (Reg)
PID: 019, Passing zone: 8 (Chevrons)
PID: 019, Passing zone: 9 (Reg + Adv)
analyzing "Part200\Left_20_20130509094509.hdf5"
PID: 200, Passing zone: 0 (Lines w/ mid)
PID: 200, Passing zone: 1 (Baseline)
PID: 200, Passing zone: 2 (Force Rh)
PID: 200, Passing zone: 3 (Advisory)
PID: 200, Passing zone: 4 (Parallax)
PID: 200, Passing zone: 5 (Reg)
PID: 200, Passing zone: 6 (Narrowing)
PID: 200, Passing zone: 7 (Reg + Adv)
PID: 200, Passing zone: 8 (Lines)
PID: 200, Passing zone: 9 (Chevrons)
Done.
Making multipanel plot took 205.4 s