The ‘tipping problem’ is commonly used to illustrate the power of fuzzy logic principles to generate complex behavior from a compact, intuitive set of expert rules.
If you’re new to the world of fuzzy control systems, you might want to check out the Fuzzy Control Primer before reading through this worked example.
Let’s create a fuzzy control system which models how you might choose to tip at a restaurant. When tipping, you consider the service and food quality, rated between 0 and 10. You use this to leave a tip of between 0 and 25%.
We would formulate this problem as:
We can use the skfuzzy control system API to model this. First, let’s define fuzzy variables
import numpy as np
import skfuzzy as fuzz
from skfuzzy import control as ctrl
# New Antecedent/Consequent objects hold universe variables and membership
# functions
quality = ctrl.Antecedent(np.arange(0, 11, 1), 'quality')
service = ctrl.Antecedent(np.arange(0, 11, 1), 'service')
tip = ctrl.Consequent(np.arange(0, 26, 1), 'tip')
# Auto-membership function population is possible with .automf(3, 5, or 7)
quality.automf(3)
service.automf(3)
# Custom membership functions can be built interactively with a familiar,
# Pythonic API
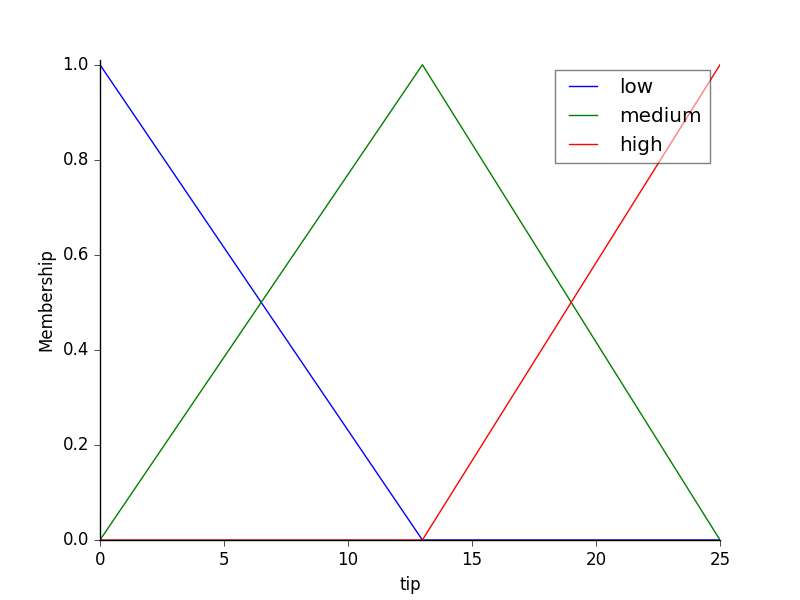
tip['low'] = fuzz.trimf(tip.universe, [0, 0, 13])
tip['medium'] = fuzz.trimf(tip.universe, [0, 13, 25])
tip['high'] = fuzz.trimf(tip.universe, [13, 25, 25])
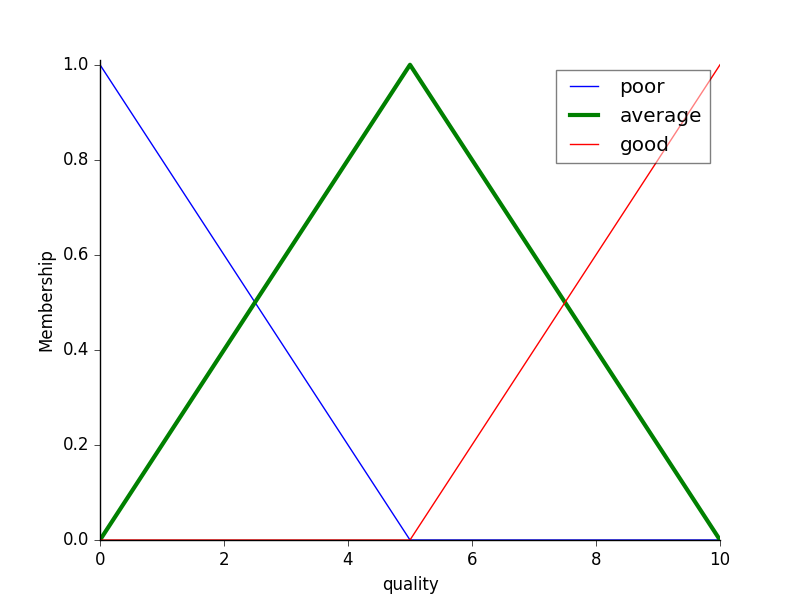
To help understand what the membership looks like, use the view methods.
# You can see how these look with .view()
quality['average'].view()
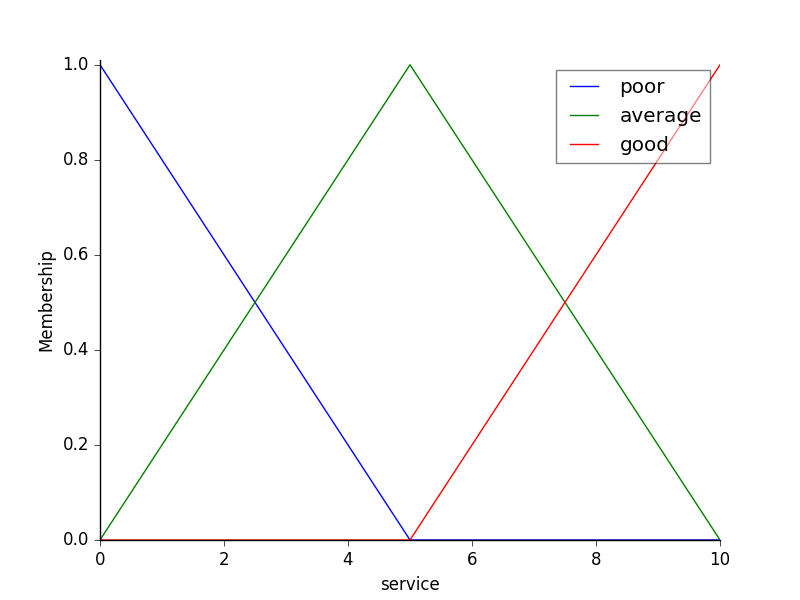
service.view()
tip.view()
Now, to make these triangles useful, we define the fuzzy relationship between input and output variables. For the purposes of our example, consider three simple rules:
Most people would agree on these rules, but the rules are fuzzy. Mapping the imprecise rules into a defined, actionable tip is a challenge. This is the kind of task at which fuzzy logic excels.
rule1 = ctrl.Rule(quality['poor'] | service['poor'], tip['low'])
rule2 = ctrl.Rule(service['average'], tip['medium'])
rule3 = ctrl.Rule(service['good'] | quality['good'], tip['high'])
rule1.view()
Now that we have our rules defined, we can simply create a control system via:
tipping_ctrl = ctrl.ControlSystem([rule1, rule2, rule3])
In order to simulate this control system, we will create a
ControlSystemSimulation. Think of this object representing our controller
applied to a specific set of cirucmstances. For tipping, this might be tipping
Sharon at the local brew-pub. We would create another
ControlSystemSimulation when we’re trying to apply our tipping_ctrl
for Travis at the cafe because the inputs would be different.
tipping = ctrl.ControlSystemSimulation(tipping_ctrl)
We can now simulate our control system by simply specifying the inputs
and calling the compute method. Suppose we rated the quality 6.5 out of 10
and the service 9.8 of 10.
# Pass inputs to the ControlSystem using Antecedent labels with Pythonic API
# Note: if you like passing many inputs all at once, use .inputs(dict_of_data)
tipping.input['quality'] = 6.5
tipping.input['service'] = 9.8
# Crunch the numbers
tipping.compute()
Once computed, we can view the result as well as visualize it.
print tipping.output['tip']
tip.view(sim=tipping)
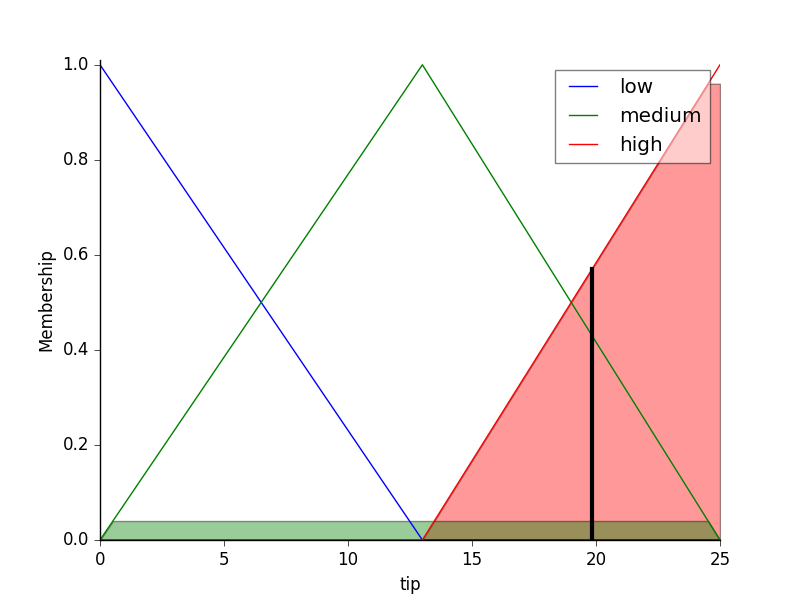
The resulting suggested tip is 20.24%.
The power of fuzzy systems is allowing complicated, intuitive behavior based
on a sparse system of rules with minimal overhead. Note our membership
function universes were coarse, only defined at the integers, but
fuzz.interp_membership allowed the effective resolution to increase on
demand. This system can respond to arbitrarily small changes in inputs,
and the processing burden is minimal.
Python source code: download
(generated using skimage 0.2)
 Source
Source