fact.instrument package¶
-
fact.instrument.get_pixel_coords()[source]¶ Calculate the pixel coordinates from the standard pixel-map file by default it gets rotated by 90 degrees clockwise to show the same orientation as MARS and fact-tools
-
fact.instrument.camera_distance_mm_to_deg(distance_mm)[source]¶ Transform a distance in mm in the camera plane to it’s approximate equivalent in degrees.
Submodules¶
fact.instrument.constants module¶
Constants describing the FACT telescope
-
fact.instrument.constants.ALTITUDE_ASL_M= 2200¶ FACT’s altitude above sea level in meters
-
fact.instrument.constants.FOCAL_LENGTH_MM= 4889¶ FACT’s reflector focal length in mm.
-
fact.instrument.constants.FOV_PER_PIXEL_DEG= 0.11133355166864294¶ Field of view of a single pixel in decimal degrees
-
fact.instrument.constants.LATITUDE_DEC_DEG= 28.7616¶ FACT’s latitude in decimal degrees
-
fact.instrument.constants.LONGITUDE_DEC_DEG= -17.8911¶ FACT’s longitude in decimal degrees
-
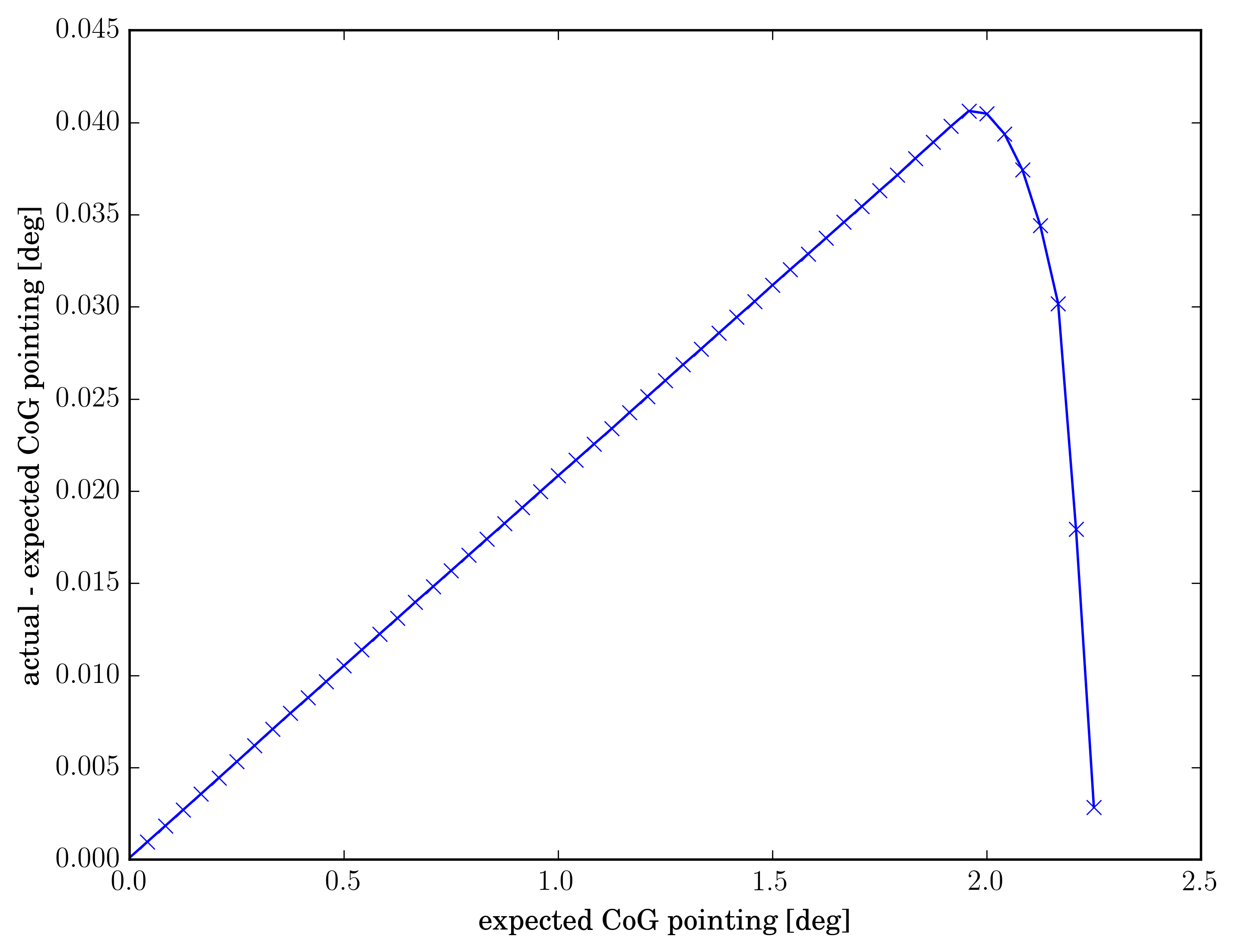
fact.instrument.constants.PINCUSHION_DISTORTION_SLOPE= 0.020666666666666667¶ The segmented imaging reflector of FACT is well described using the thin lens equation. However, the most prominent deviation from the thin lens, is the imaging reflectors pincushin distortion. The pincushin distortion projects incomning light further away from the optical axis as it is expected from the thin lens equation. The additional outward pin-cushin distortion gets stronger the further the distance to the optical axis is.
actual_projection_angle = (1 + PINCUSHION_DISTORTION_SLOPE) * thin_lens_prediction_angleExample: According to the tĥin lens model one expects incoming light of 1.5 deg incident angle relative to the optical axis to be projected in:
tan(1.5deg)*focal_length = 128.02mmdistance to the optical axis on the image sensor screen. But the reflector actually projects this incoming light further to the outside to:
128.02mm * (1 + PINCUSHION_DISTORTION_SLOPE) = 130.67mmAs one can see, the correction is minor. It is only half a pixel at the outer rim of the field of view.
-
fact.instrument.constants.PIXEL_SPACING_IN_MM= 9.5¶ The inner diameter of the hexagonal pixels in mm. This is also the grid constant of the hex grid.
fact.instrument.camera module¶
-
fact.instrument.camera.camera_distance_mm_to_deg(distance_mm)[source]¶ Transform a distance in mm in the camera plane to it’s approximate equivalent in degrees.
-
fact.instrument.camera.combine_bias_patch_current_to_trigger_patch_current(bias_patch_currents)[source]¶ For this to work, you need to know that the calibrated currents in FACT which are delivered by the program FEEDBACK for all 320 bias patches are given as “uA per pixel per bias patch”, not as “uA per bias patch” So if you want to combine these currents into one value given as: “uA per trigger patch” or “uA per pixel per trigger patch”, you need to know the number of pixels in a bias patch.
Luckily this is given by our patch_indices() DataFrame
-
fact.instrument.camera.get_pixel_coords()[source]¶ Calculate the pixel coordinates from the standard pixel-map file by default it gets rotated by 90 degrees clockwise to show the same orientation as MARS and fact-tools
-
fact.instrument.camera.reorder_softid2chid(array)[source]¶ Returns view to the given array, remapped from softid order to chid order (e.g. MARS ordering to fact-tools ordering)
-
fact.instrument.camera.take_apart_trigger_values_for_bias_patches(trigger_rates)[source]¶ Assumption is you have 160 values from trigger patches, such as the trigger rates per patch, or the trigger threshold per patch or whatever else you cant find per patch.
And for some reason you say: Well this is valid for the entire trigger patch really, but I believe it also correlates with the bias patch