In this example it is shown how the gradient of the function
def O_tilde(u):
""" this is the objective function"""
M = numpy.shape(u)[0]
h = 1./(M-1)
return M**2*h**2 + numpy.sum(0.25*( (u[1:,1:] - u[0:-1,0:-1])**2 + (u[1:,0:-1] - u[0:-1, 1:])**2))
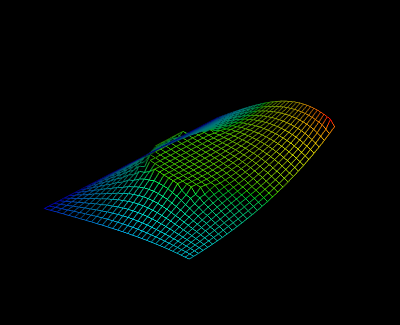
can be computed conveniently using ALGOPY. It is the objective function of a minimal surface problem. With boundary constraints and an additional constraint in the domain in form of a cylinder one obtains a plot like
At first the initial values are specified and the function evaluation is traced
# INITIAL VALUES
M = 30
h = 1./M
u = numpy.zeros((M,M),dtype=float)
u[0,:]= [numpy.sin(numpy.pi*j*h/2.) for j in range(M)]
u[-1,:] = [ numpy.exp(numpy.pi/2) * numpy.sin(numpy.pi * j * h / 2.) for j in range(M)]
u[:,0]= 0
u[:,-1]= [ numpy.exp(i*h*numpy.pi/2.) for i in range(M)]
# trace the function evaluation and store it in cg
cg = algopy.CGraph()
Fu = algopy.Function(u)
Fy = O_tilde(Fu)
cg.trace_off()
cg.independentFunctionList = [Fu]
cg.dependentFunctionList = [Fy]
One can now compute the gradient of the objective function as follows
def dO_tilde(u):
# use ALGOPY to compute the gradient
g = cg.gradient([u])[0]
# on the edge the analytical solution is fixed
# so search direction must be zero on the boundary
g[:,0] = 0
g[0,:] = 0
g[:,-1] = 0
g[-1,:] = 0
return g
The complete code is
import numpy
import algopy
def O_tilde(u):
""" this is the objective function"""
M = numpy.shape(u)[0]
h = 1./(M-1)
return M**2*h**2 + numpy.sum(0.25*( (u[1:,1:] - u[0:-1,0:-1])**2 + (u[1:,0:-1] - u[0:-1, 1:])**2))
# INITIAL VALUES
M = 30
h = 1./M
u = numpy.zeros((M,M),dtype=float)
u[0,:]= [numpy.sin(numpy.pi*j*h/2.) for j in range(M)]
u[-1,:] = [ numpy.exp(numpy.pi/2) * numpy.sin(numpy.pi * j * h / 2.) for j in range(M)]
u[:,0]= 0
u[:,-1]= [ numpy.exp(i*h*numpy.pi/2.) for i in range(M)]
# trace the function evaluation and store it in cg
cg = algopy.CGraph()
Fu = algopy.Function(u)
Fy = O_tilde(Fu)
cg.trace_off()
cg.independentFunctionList = [Fu]
cg.dependentFunctionList = [Fy]
def dO_tilde(u):
# use ALGOPY to compute the gradient
g = cg.gradient([u])[0]
# on the edge the analytical solution is fixed
# so search direction must be zero on the boundary
g[:,0] = 0
g[0,:] = 0
g[:,-1] = 0
g[-1,:] = 0
return g
def projected_gradients(x0, ffcn,dffcn, box_constraints, beta = 0.5, delta = 10**-3, epsilon = 10**-2, max_iter = 1000, line_search_max_iter = 100):
"""
INPUT: box_constraints [L,U], where L (resp. U) vector or matrix with the lower (resp. upper) bounds
"""
x = x0.copy()
L = numpy.array(box_constraints[0])
U = numpy.array(box_constraints[1])
def pgn(s):
a = 1.* (x>L)
b = 1.*(abs(x-L) <0.00001)
c = 1.*(s>0)
d = numpy.where( a + (b*c))
return numpy.sum(s[d])
def P(x, s, alpha):
x_alpha = x + alpha * s
a = x_alpha-L
b = U - x_alpha
return x_alpha - 1.*(a<0) * a + b * 1. * (b<0)
s = - dffcn(x)
k = 0
while pgn(s)>epsilon and k<= max_iter:
k +=1
s = - dffcn(x)
for m in range(line_search_max_iter):
#print 'm=',m
alpha = beta**m
x_alpha = P(x,s,alpha)
if ffcn( x_alpha ) - ffcn(x) <= - delta * numpy.sum(s* (x_alpha - x)):
break
x_old = x.copy()
x = x_alpha
return x_old,s
# Setup of the optimization
# X AND Y PARTITION
x_grid = numpy.linspace(0,1,M)
y_grid = numpy.linspace(0,1,M)
# BOX CONSTRAINTS
lo = 2.5
L = numpy.zeros((M,M),dtype=float)
for n in range(M):
for m in range(M):
L[n,m] = 2.5 * ( (x_grid[n]-0.5)**2 + (y_grid[m]-0.5)**2 <= 1./16)
U = 100*numpy.ones((M,M),dtype=float)
Z,s = projected_gradients(u,O_tilde,dO_tilde,[L,U])
# # Plot with MAYAVI
x = y = list(range(numpy.shape(Z)[0]))
try:
import enthought.mayavi.mlab as mlab
except:
import mayavi.mlab as mlab
mlab.figure()
mlab.view(azimuth=130)
s = mlab.surf(x, y, Z, representation='wireframe', warp_scale='auto', line_width=1.)
mlab.savefig('./mayavi_3D_plot.png')
# mlab.show()