RPIO.PWM, PWM via DMA for the Raspberry Pi¶
RPIO.PWM provides PWM via DMA for the Raspberry Pi, using the onboard PWM module for semi-hardware pulse width modulation with a precision of up to 1µs.
With RPIO.PWM you can use any of the 15 DMA channels and any number of GPIOs per channel. Since the PWM is done via DMA, RPIO.PWM uses almost zero CPU resources and can generate stable pulses with a very high resolution. RPIO.PWM is implemented in C (source); you can use it in Python via the provided wrapper, as well as directly from your C source.
RPIO.PWM provides low-level methods to control everything manually, as well as helper classes that simplify PWM for specific usages (such as RPIO.PWM.Servo). This module is currently in beta, please send feedback to chris@linuxuser.at. As of yet only BCM GPIO numbering is supported.
Examples¶
Example of using PWM.Servo (with the default subcycle time of 20ms and default pulse-width increment granularity of 10µs):
from RPIO import PWM
servo = PWM.Servo()
# Set servo on GPIO17 to 1200µs (1.2ms)
servo.set_servo(17, 1200)
# Set servo on GPIO17 to 2000µs (2.0ms)
servo.set_servo(17, 2000)
# Clear servo on GPIO17
servo.stop_servo(17)
Example of using the low-level PWM methods:
from RPIO import PWM
# Setup PWM and DMA channel 0
PWM.setup()
PWM.init_channel(0)
# Add some pulses to the subcycle
PWM.add_channel_pulse(0, 17, 0, 50)
PWM.add_channel_pulse(0, 17, 100, 50)
# Stop PWM for specific GPIO on channel 0
PWM.clear_channel_gpio(0, 17)
# Shutdown all PWM and DMA activity
PWM.cleanup()
RPIO.PWM.Servo¶
Here is a detailled overview of the RPIO.PWM.Servo class (from $ pydoc RPIO.PWM.Servo):
class Servo
|
| Methods defined here:
|
| __init__(self, dma_channel=0, subcycle_time_us=20000, pulse_incr_us=10)
| Makes sure PWM is setup with the correct increment granularity and
| subcycle time.
|
| set_servo(self, gpio, pulse_width_us)
| Sets a pulse-width on a gpio to repeat every subcycle
| (by default every 20ms).
|
| stop_servo(self, gpio)
| Stops servo activity for this gpio
RPIO.PWM¶
Low-level PWM method documentation (from $ pydoc RPIO.PWM):
FUNCTIONS
add_channel_pulse(dma_channel, gpio, start, width)
Add a pulse for a specific GPIO to a dma channel (within the subcycle)
cleanup()
Stops all PWM and DMA actvity
clear_channel(channel)
Clears a channel of all pulses
clear_channel_gpio(channel, gpio)
Clears one specific GPIO from this DMA channel
get_channel_subcycle_time_us(channel)
Returns this channels subcycle time in us
get_pulse_incr_us()
Returns the currently set pulse width increment granularity in us
init_channel(channel, subcycle_time_us=20000)
Setup a channel with a specific subcycle time [us]
is_channel_initialized(channel)
Returns 1 if this channel has been initialized, else 0
is_setup()
Returns 1 if setup(..) has been called, else 0
print_channel(channel)
Print info about a specific channel to stdout
set_loglevel(level)
Sets the loglevel for the PWM module to either PWM.LOG_LEVEL_DEBUG for all
messages, or to PWM.LOG_LEVEL_ERRORS for only fatal error messages.
setup(pulse_incr_us=10, delay_hw=0)
Setup needs to be called once before working with any channels.
Optional Parameters:
pulse_incr_us: the pulse width increment granularity (deault=10us)
delay_hw: either PWM.DELAY_VIA_PWM (default) or PWM.DELAY_VIA_PCM
CONSTANTS
DELAY_VIA_PCM = 1
DELAY_VIA_PWM = 0
LOG_LEVEL_DEBUG = 0
LOG_LEVEL_ERRORS = 1
PULSE_WIDTH_INCREMENT_GRANULARITY_US_DEFAULT = 10
SUBCYCLE_TIME_US_DEFAULT = 20000
VERSION = '0.9.1'
Under the hood¶
Take a look at the C source code on Github for more details.
Subcycles¶
Each DMA channel is setup with a specific subcycle, within which pulses are added, and which will be repeated endlessly. Servos, for instance, typically use a subcycle of 20ms, which will be repeated 50 times a second. You can add pulses for multiple GPIOs, as well as multiple pulses for one GPIO. Subcycles cannot be lower than 2ms.
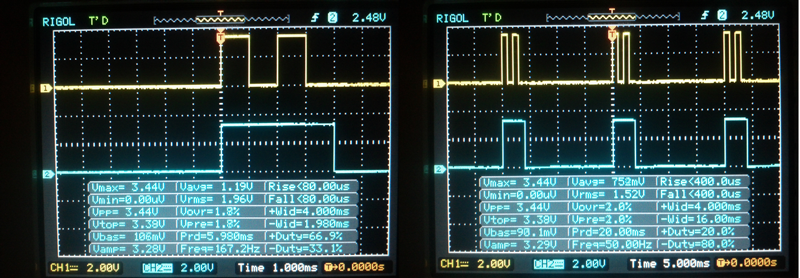
For more information about subcycles, see the examples below. The left oscilloscope images zoom in on one subcycle, the right-handed images are zoomed out to show their repetition.
Pulse-width increment granularity¶
The pulse-width increment granularity (10µs by default) is used for all DMA channels (since its passed to the PWM timing hardware). Pulses are added to a subcycle by specifying a start and a width parameter, both in multiples of the granularity. For instance to set 500µs pulses with a granularity setting of 10µs, you’ll need to set the pulse-width as 50 (50 * 10µs = 500µs).
The pulse-width granularity is a system-wide setting used by the PWM hardware, therefore you cannot use different granularities at the same time, even in different processes.
Example with Oscilloscope¶
In the oscilloscope images, GPIO 15 the blue channel and GPIO 17 the yellow one. The left oscilloscope images show one subcycle, the right images are ‘zoomed out’ to show their repitition. First we setup PWM.Servo with the default 20ms subcycle and 10µs pulse-width increment granularity:
from RPIO import PWM
servo = PWM.Servo()

Now set a 4000us (4ms) pulse every 20ms for GPIO 15:
servo.set_servo(15, 4000)
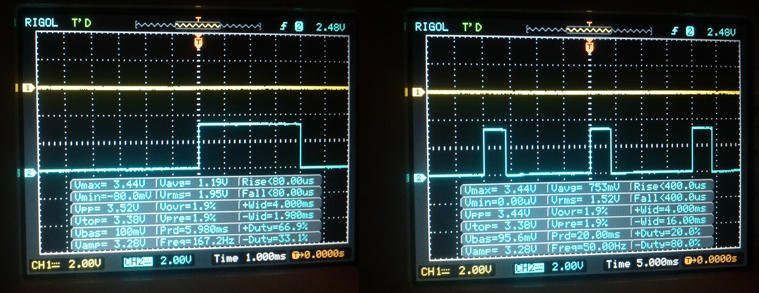
Now a 1000us (1ms) pulse for GPIO 17:
servo.set_servo(17, 1000)
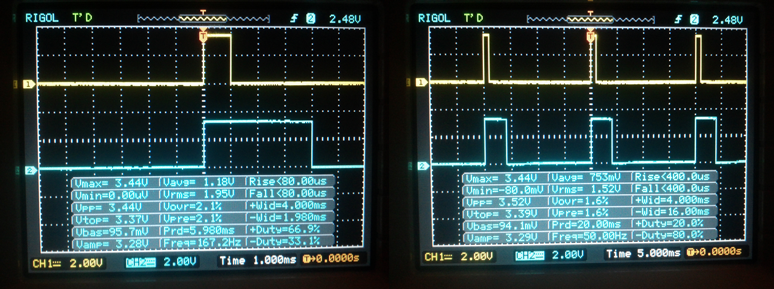
We can use the low-level PWM methods to add further pulses to a subcycle. This is done in multiples of the pulse-width increment granularity (start=200*10µs=2000µs, width=100*10µs=1000µs):
PWM.add_channel_pulse(0, 17, start=200, width=100)